

常见ROSbot报错及解决方案1、依赖包未正确配置问题描述:在使用ROS功能包时,如果遇到类似[rospack]Error:package'test'notfound的错误,通常是因为系统环境变量没有正确配置,解决方案:确保你已经...
SSP报错的全面解析与解决方案SSP简介SSP(SecureShellProtocol)是一种用于加密网络连接的协议,广泛应用于远程登录、文件传输等场景,在实际使用过程中,用户可能会遇到各种报错问题,这些问题不仅影响用户体验,还可能对系...

在处理和解决session报错时,我们需要全面了解可能的原因、排查方法以及解决方案,下面将详细介绍如何诊断和修复session相关的报错,Session报错的常见原因1、配置错误:-配置文件(如php.ini或web.config)中的...

Scrapy是一个流行的Python网络爬虫框架,但在使用中可能会遇到各种问题,以下是一些常见的错误及其解决方法:1、依赖项问题描述:Scrapy依赖于许多第三方库,如lxml、cssselect、w3lib等,如果这些库未正确安装,会导致...
Tomcat是一个广泛使用的开源JavaWeb应用服务器,用于运行JavaServlets和JSP页面,在使用Tomcat的过程中,用户可能会遇到各种报错问题,这些问题可能涉及到配置文件、端口设置、依赖管理等多个方面,...
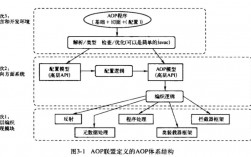
在AspectJ中,pointcut是用于定义切入点表达式的关键字,如果在使用pointcut时遇到错误,通常是由于语法或逻辑上的问题,下面将详细解释一些常见的错误及其解决方法,并提供一个FAQs部分以解答相关疑问,常见错误及解决方案1....
Hotnode是一个用于实时通信和数据同步的开源项目,通常用于构建高性能的WebSocket服务器,在配置和使用Hotnode的过程中,开发者可能会遇到各种错误,本文将详细解析一些常见的Hotnode报错信息,并提供相应的解决...
在使用J-Flash进行程序烧写时,可能会遇到各种报错问题,这些报错不仅会阻碍开发进程,还会影响项目的进度和质量,为了帮助开发者更好地解决这些问题,本文将详细分析常见的J-Flash报错及其解决方案,常见J-Flash报错及解决方案错误信...
报错FATAL分析与解决当您遇到“【报错FATAL】”信息时,通常意味着程序或系统遇到了一个严重的问题,导致其无法继续运行,这种错误可能由多种原因引起,包括但不限于代码错误、资源不足、权限问题、配置错误等,本文将详细分析可能导致“【报错FA...
在设备树(DeviceTree,DT)的编译过程中,dtsi文件的错误可能会引发一系列问题,导致无法生成设备树二进制文件(DTB),以下是对dtsi报错问题的详细分析:1、语法错误:设备树源文件(DTS/DTSI)中的语法错误是最常见...
